鈑材切割的機器人系統是一種自動化設備,用于對鈑金材料進行切割和加工。以下是鈑材切割機器人系統的主要組成部分和工作流程:
機器人:鈑材切割機器人是系統的核心部分,它通常采用多關節機械手臂,具有靈活的動作能力和高精度的定位能力。
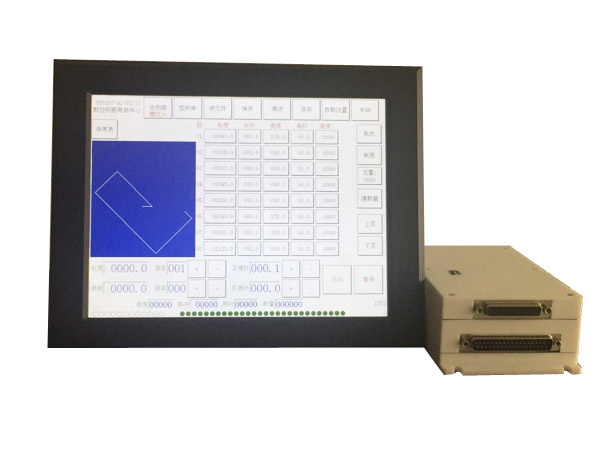
控制系統:控制系統是鈑材切割機器人系統的大腦,負責控制機器人的運動和操作。它通常包括硬件控制器和軟件編程,可以實現機器人的路徑規劃、速度控制和協調動作。
切割工具:鈑材切割機器人通常使用切割工具來對鈑金材料進行切割,常見的切割工具包括激光切割頭、火焰切割頭、等離子切割頭等。不同的切割工具適用于不同的材料和切割要求。
感應器和傳感器:鈑材切割機器人系統通常配備感應器和傳感器,用于檢測和感知工作環境和材料。例如,光電傳感器可以用來檢測工件的位置和邊緣,壓力傳感器可以用來檢測切割力度等。
數據輸入和處理:鈑材切割機器人系統可以通過各種方式獲取切割的數據信息,例如通過CAD文件導入、人機界面輸入等。處理這些數據可以進行路徑規劃、優化切割方案等。
工作流程:鈑材切割機器人系統的工作流程通常包括以下步驟:
a. 數據導入和處理:將切割的數據導入系統,并進行必要的處理和優化。
b. 機器人路徑規劃:根據切割數據和工件形狀,系統會自動計算機器人的*佳運動路徑,以實現高效的切割操作。
c. 材料固定和定位:將待切割的鈑金材料固定在工作臺上,并確保其正確的位置和角度,以保證切割的準確性。
d. 切割操作:根據路徑規劃,機器人將切割工具準確地移動到待切割位置,并進行切割操作。切割過程中,系統會監測切割質量和實時調整切割參數。
e. 切割完成和卸載:切割完成后,機器人會自動將切割好的零件卸載并進行下一步處理。
鈑材切割的機器人系統具有高效、精確和自動化的特點,可以大大提高鈑金材料的切割效率和質量,減少人工操作的錯誤和勞動強度。它廣泛應用于鈑金加工、汽車制造、航空航天等領域。








 冀公網安備 13100202000581號
冀公網安備 13100202000581號